































Lanakila holoʻokoʻa: hui Bullseye mai ke Kulanui ʻo Wageningen, Netherlands; Nā hana manuahi me nā manaʻo ʻike; Hōʻike ka hoʻohālikelike kahua i kahi paʻakikī me nā pōmaikaʻi aʻo nui; ʻOi aku ma mua o 500 mau mea nānā honua ma ka pūnaewele i ʻekolu lā
(DLG) I hui pū ʻia e DLG Feldtage a i kēia makahiki, no ka manawa mua, i mālama ʻia ma ke ʻano virtual ma ke kahua kikohoʻe o DLG, ka 18th international Field Robot Event, he hoʻokūkū lopako kahua no nā hui haumāna honua, i hoʻopau ʻia me ka hoʻolaha ʻana o nā mea lanakila, i hōʻike ʻia e nā mea hoʻonohonoho, Hohenheim University a me Wageningen University. ʻO ka lanakila holoʻokoʻa o ka hanana 2021, ʻo ia ka hui Bullseye mai ke Kulanui ʻo Wageningen, ʻo Netherlands, ka mea i hoʻokolokolo ʻia ma kāna hana ma nā hana kahua ʻehā i hoʻokomo ʻia ka hoʻokele ʻana i nā lālani maile curved, ma nā lālani pololei me ka ʻole o ka nalo ʻana o nā mea kanu, nā weed a me nā ʻōpala. a hoʻoneʻe ʻia i ke poʻo. ʻO ka hanana manuahi, kahi hanana koho e hiki ai i nā hui haumāna ke hōʻike i ko lākou akamai i ka ʻenekinia e hoʻoponopono i kahi hana mahiʻai i koho ponoʻī ʻia, ua lanakila ʻia e ka hui Ceres, Münster University of Applied Sciences me kāna robot hōʻiliʻili i hiki ke ʻike a ʻohi i nā paukena. .
518 mau mea nānā honua e hoʻolohe
He 518 ka poʻe nānā mai ka honua holoʻokoʻa i ka hanana, ʻaʻole wale nā mea loea a me nā loea, nā ʻenekinia, nā limahana o ke kulanui a me nā haumāna, akā ʻo nā mea mahiʻai mai nā ʻāina like ʻole. Ua hele pū nā poʻe ʻoihana e like me nā luna huahana i ka hanana ola, i uhi ʻia e nā mea nūpepa honua, e hoʻolohe ana e nānā i nā robots e hana ana i kahi ʻano simulation photo-realistic e like me ka mea i hoʻohana ʻia e NASA no ka ʻimi ʻana i ka lewa. Ma o ke kamaʻilio ola ʻana, ua loaʻa i nā mea nānā ka manawa e launa pū me nā hui honua 14 mai Denmark, Kelemānia, Netherlands, Romania, a me Slovenia, a me nā loea a me nā mea nānā ʻē aʻe.
He makana hui no ka hoʻomohala ʻana i nā māla maile virtual
Ua hāʻawi ʻia ka makana Hoʻohanohano hanohano iā Kamaro Engineering, he hui ʻenekinia haumāna no nā robots kahua hou mai Karlsruhe Institute of Technology (KIT). Hoʻomaopopo ka makana hui i ka hāʻawi ʻana i ka hoʻomohala ʻana i ka māla maile virtual i nā kaiapuni i hoʻohālikelike ʻia. Ua komo kēia hana i ke kākau ʻana i nā code e wehewehe pono ana i ke ʻano o ka mea kanu maile a me nā ʻāpana ʻē aʻe a me ka hana ʻana i nā hopena ola maoli e like me ka makani a me nā aka e hoʻokō i nā ʻano hiʻohiʻona mahiʻai, ʻoi aku ka ʻike ʻana i ka mauʻu a me ka ʻike ʻana i nā pilikia.
ʻElua mau pūʻulu o nā kālena o ke kula
I kēia makahiki, ʻelua mau hui - ʻo Carbonite a me Camper Robotic - nā keiki o ke kula me nā talena ʻenehana mai nā kūlanakauhale Kelemania ʻo Hamburg a me Überlingen. Ua hoʻomohala ka hui ʻo Camper Robotic i kahi ʻano lopako "Segway" i kapa ʻia ʻo Field Balancer. Ua ʻoi aku ka maikaʻi o ka hui Carbonite ma nā hana he nui, ʻo ke kolu o ka nui.
"He hana mua kēia hanana virtual a hauʻoli nui mākou i ka hopena a me nā pane mai nā haumāna. ʻO kahi kaiapuni i hoʻohālikelike ʻia he ʻāpana nui o ka hana hoʻomohala no kahi robot kahua. Ke manaʻoʻiʻo nei au he hana maikaʻi loa kēia hanana, e ola ana ma kahi ʻano hoʻohālikelike, ʻaʻole ia e hoʻokumu wale i ka mea e hiki ai i ka ʻōnaehana ke hoʻohālikelike pū me nā hui ʻē aʻe. Loaʻa kēia i nā pōmaikaʻi aʻo nui no nā mahina he nui e hiki mai ana, "wahi a Prof. Hans W. Griepentrog, Luna Hoʻokele, Section of Technology in Crop Production, University of Hohenheim, Germany.
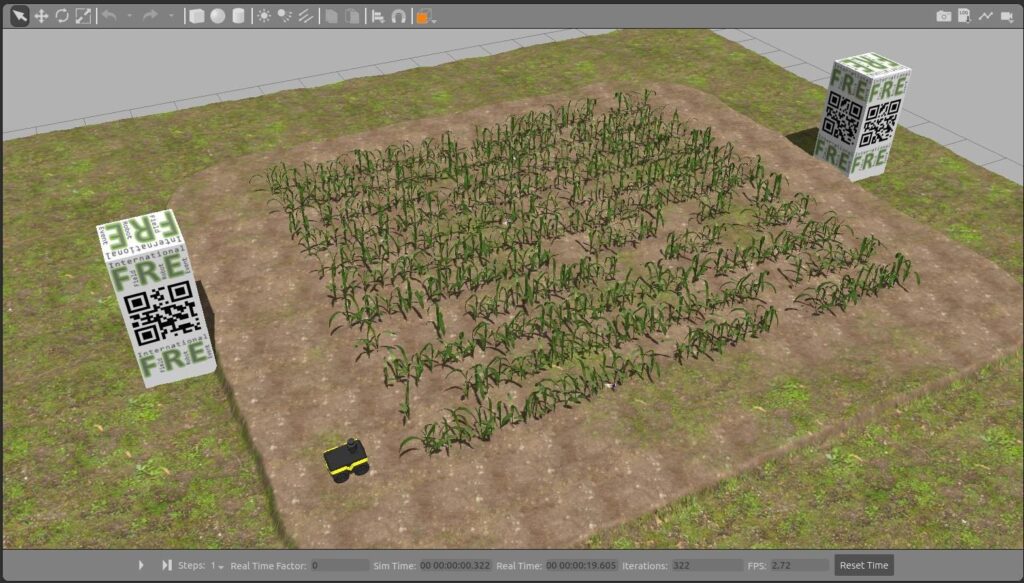
"ʻO ka ROS Gazebo simulation environment, a mākou i hana kūikawā ai no kēia hanana, he mea pono i nā hui haumāna a no laila ua hoʻoholo mākou e mālama iā lākou ma hope o ka hoʻokūkū, i hiki i nā haumāna ke hoʻāʻo i kā lākou mau hoʻohālike robot e hiki mai ana ma kēlā kahua. "wahi a Prof Griepentrog.
ʻO ka hanana kūʻokoʻa - nā manaʻo e hiki mai ana
ʻO ka hana freestyle i loko o ka hanana he mea koʻikoʻi nā mea nānā a hāʻawi i ka puka makani i ka wā e hiki mai ana me nā manaʻo ʻike no nā noi kahua, i koho ʻia a hoʻomohala ʻia e nā hui ponoʻī. ʻO kahi ʻāpana koho i ka hoʻokūkū, hāʻawi ka hana i nā hui haumāna i ka manawa e hōʻike i ko lākou mākaukau i ka hoʻomohala ʻana i kahi hoʻonā no kahi hana maʻamau o kā lākou koho. Ma ka hanana o kēia makahiki, ua hōʻike ʻia nā hana manuahi e nā haumāna ma ke ʻano he wikiō. Loaʻa nā hana manuahi i kahi lopako hōʻiliʻili mai Ceres, e lanakila ana i ka ʻāpana manuahi. ʻO ka lua e hiki mai ana, i hoʻomohala ʻia e ka hui FarmBeast, ke Kulanui ʻo Maribor, he mea hoʻoheheʻe i hiki ke ʻike i ka mauʻu a me ka hoʻopu ʻana i ka pahu ma kahi e pono ai, e kōkua ana i ka pale ʻana i ka lepo. ʻO ke kolu o ka hui ʻo Kamaro me kāna lopako kahua ʻo Beteigeuze, e hōʻike ana iā ia iho ma ke ʻano he modular self-configuring field robot me nā mea hoʻopili he nui, me nā mea hana trailer.
ʻO ka hanana honua honua robot he hoʻokūkū hoʻokūkū honua honua e hoʻopuni ana i nā hana āpau. ʻO ka hoʻokele ʻana i ka robot ma waena o nā lālani hua curved, ka ʻike ʻana i nā mea he mauhele a i ʻole ka ʻōpala wale a me ka palapala ʻana i nā mea me ka hoʻohana ʻana i ka geo-referencing kekahi ʻāpana o nā pilikia i hoʻoponopono ʻia e nā robots kahua e hoʻohana ana i nā sensors a me nā algorithms. ʻO ka unuhi ʻana i ka ʻike i ka manawa maoli, e like me ka hoʻoholo ʻana i ka weed me ka hoʻohana ʻana i ka pahupaʻikiʻi paʻakikī, a koi i nā mahina he nui o ka hana hoʻomohala ma mua. ʻO kahi hana hou e pono ai ka wehe ʻana i ka mauʻu a me ka ʻōpala, kahi e pono ai ka mana lako polokalamu pono o nā mea hana e hana ana i ka mea hana. ʻO ka paʻakikī ka hoʻomaopopo ʻana i ka ʻikepili i ka lā, e pili ana i ka robot e unuhi i ka ʻike i hāʻawi ʻia a hoʻoholo i nā hoʻoholo maikaʻi loa. ʻO ka paʻakikī, ka hana a me ka pono o ka mahiʻai ʻo ia nā pae hoʻoholo koʻikoʻi.
Loaʻa nā wikiō o ka hoʻokūkū
Ma ke koi ʻana i nā wikiō o ka hanana ʻana i nā lā ʻekolu lā, ʻo ia hoʻi nā hana āpau i hoʻohālikelike ʻia, nā ʻōlelo a nā luna kānāwai a me nā wikiō i hoʻouna ʻia e nā hui no ka hana manuahi, aia ma ka pūnaewele pūnaewele o DLG ma ke ʻano he loulou kaʻawale no kēlā me kēia lā hanana.
8 Iune: Ka hoʻokele ʻana ma ka māla mai me nā lālani ʻōpiʻo; Nā lālani pololei me nā mea kanu nalo. Link
9 Iune: ʻImi nahelehele a me nā mea a me ka georeferencing; ka lawe ʻana i ke poʻo. Link
10 Iune: Ka hanana ʻokoʻa. Link
Loaʻa nā kikoʻī piha o ka poʻe lanakila o kēlā me kēia o nā ʻāpana ʻelima a loaʻa kā lākou helu ma. https://www.fieldrobot.com/event/
Ua mālama ʻia ka hanana lopako honua honua ma ka paepae kikohoʻe o DLG, ʻo ia hoʻi ka home o nā hanana mahiʻai kikohoʻe nui. ʻO ka paepae kahi kahua pili e hāʻawi ana i kāna mau mea hoʻohana i ka ʻike huahana a me ka pilina pilikino, hui a i ʻole ka lehulehu.
ʻO ka noiʻi ʻana o ka robot field Practical mai 2003
ʻO ka hoʻokūkū lopako kahua, i hoʻokuʻu ʻia ma 2003 e Wageningen University ma Netherlands, e hoʻāʻo i nā robotics paionia a me nā ʻenehana mahiʻai pololei ma lalo o nā kūlana honua maoli, a hāʻawi i nā ʻepekema ʻōpio i ka manawa e hoʻololi a hoʻomohala i kā lākou mau manaʻo me kā lākou mau hoa. E like me ka hanana kahua, ua loaʻa i nā mea hoʻokūkū i ka hanana virtual ka manawa e launa pū me kekahi a me nā mea nānā honua. He ʻāpana koʻikoʻi kēia pilina o ka hanana a ua kōkua iā lākou e holomua i kā lākou mau manaʻo.
ʻO ka 2021 Field Robot Event, i mālama ʻia ma ka hōʻikeʻike DLG-Feldtage mai 2014, hāʻawi i nā hoʻokolohua virtual koi no nā robots a me kā lākou mea hana, a me ka leʻaleʻa hoihoi no ka poʻe nānā virtual.]

{kind=link}